Bohrdrohne
Ausgangssituation
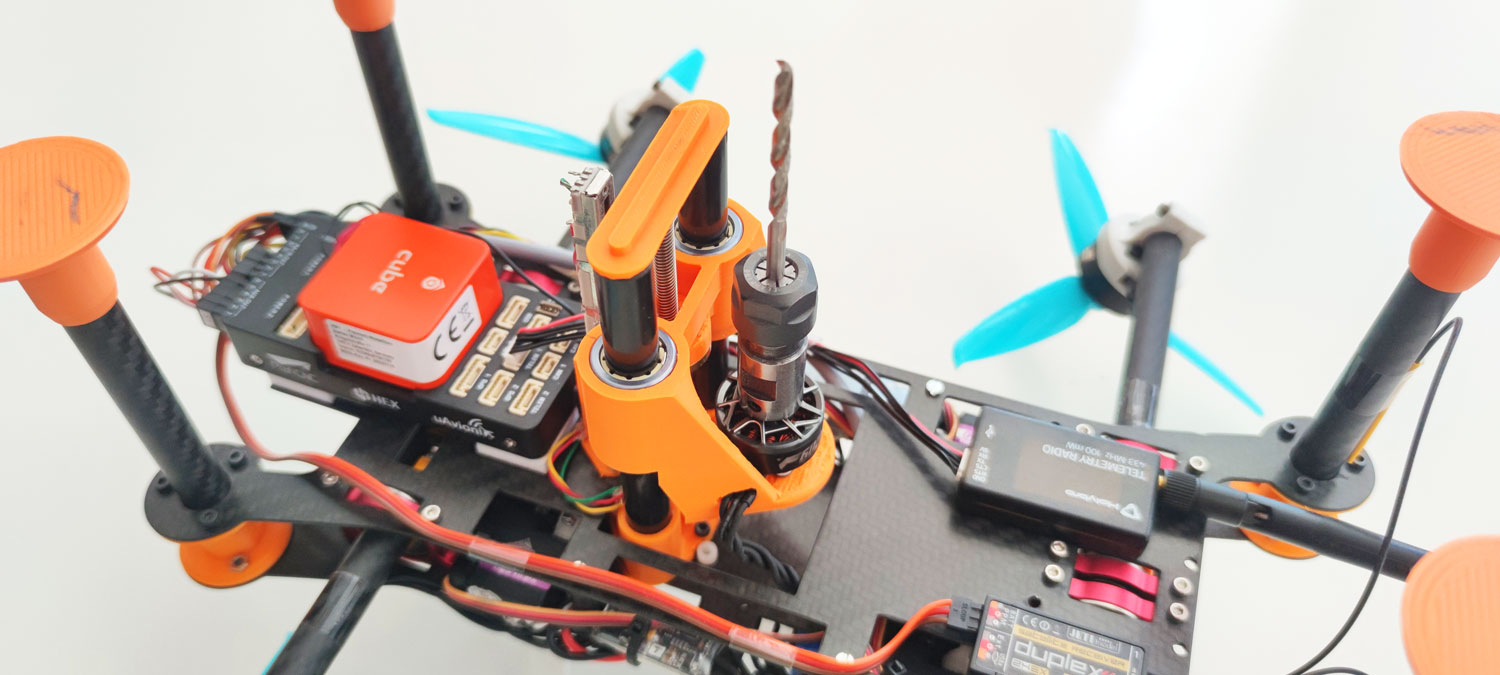
Der Kunde hatte eine Idee für eine innovative Anwendung von Multirotor-Fluggeräten, einschließlich eines Gebrauchsmusters. Er wollte einen fliegenden Demonstrator als Machbarkeitsnachweis.
Besondere Herausforderungen
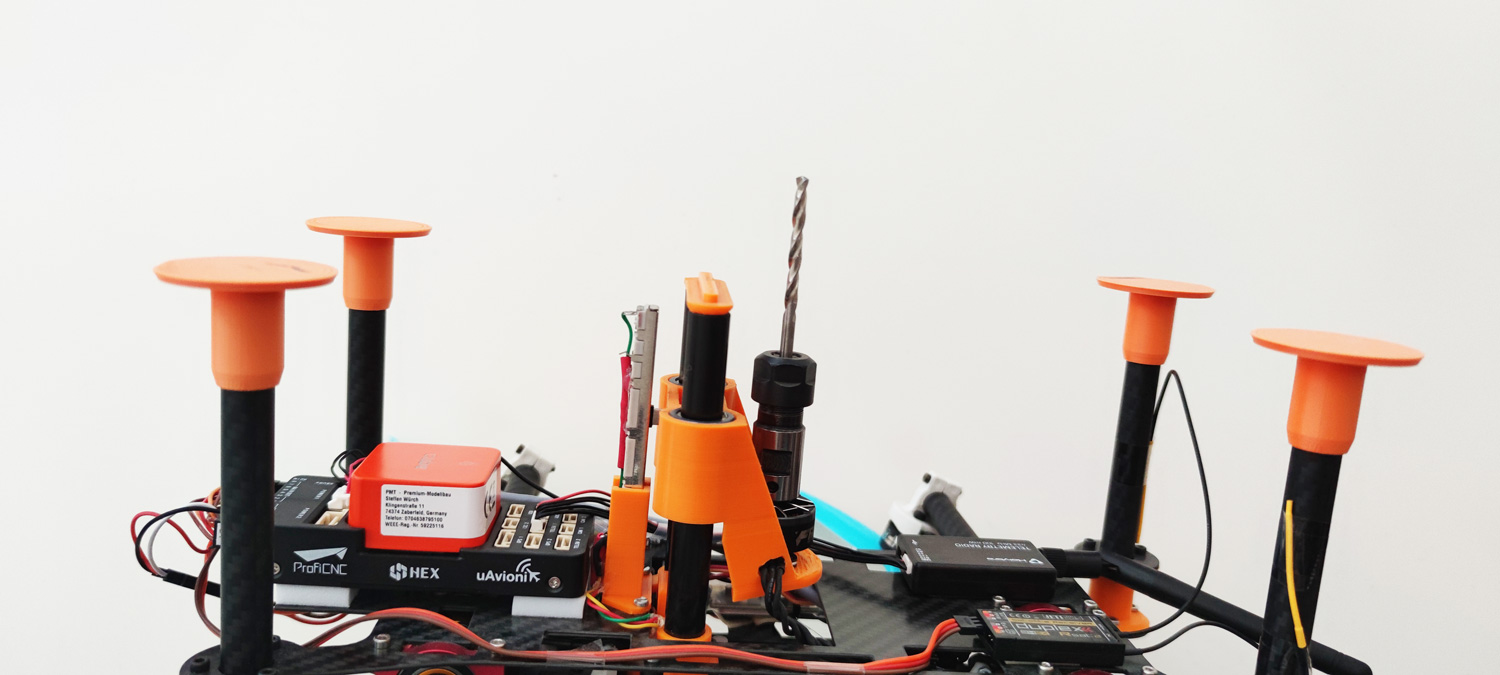
Das Bohrmodul musste vollständig neu entwickelt werden – mit geringem Gewicht und kompakter Bauweise, da ein solches Produkt am Markt nicht verfügbar war.
Individuelle Lösung
Ein Demonstrator wurde gebaut und im Flug getestet, um zu zeigen, dass das Konzept grundsätzlich umsetzbar ist. Zusätzlich wurde eine theoretische Studie durchgeführt, um die Grenzen des Konzepts in Bezug auf Deckenmaterial und die Größe des Fluggeräts zu ermitteln.
Ein Bericht über das Projekt wurde in der Zeitschrift „Drones“ veröffentlicht.
Kunde
Christoph Kunz, Inspirationsquelle, Deutschland
Jahr
2022
Projektdauer
12 Wochen
- Konzeptstudie zur Machbarkeit von Bohrungen in Gebäudedecken mit Multirotor-Fluggeräten
- Entwurf und Bau eines fliegenden Prototyps
- Anpassung des Autopiloten für schwenkbare Propeller
- Softwareentwicklung zur Steuerung des Bohrkopfs (Koordination von Bohrmotor und Vorschubmotor)

{kind=link}
{kind=link}
{kind=link}
Lynchpin
Ausgangssituation
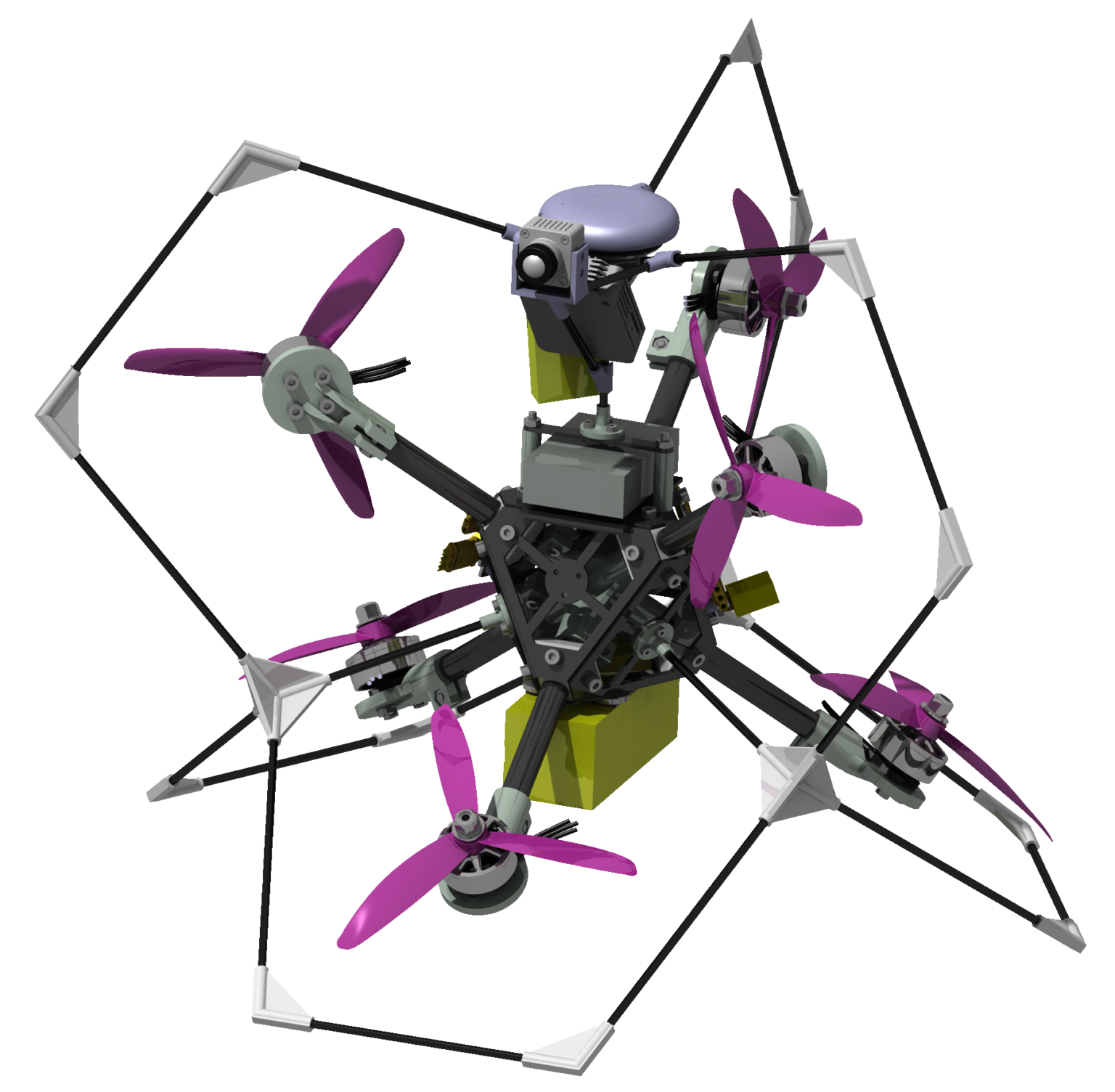
Der Oscar-nominierte Hollywood-Schauspieler Terrence Howard entwarf eine innovative Geometrie für ein Multirotor-Fluggerät. Allerdings hatte er keine Vorerfahrung im Design oder Bau von Drohnen.
Besondere Herausforderungen
Zum damaligen Zeitpunkt war es nicht möglich, eine Drohne mit 6 Freiheitsgraden (6DOF) mit PX4 oder ArduPilot ohne Codeanpassungen zu fliegen. Neben der Ableitung der mathematischen Gleichungen war es zudem entscheidend, die genaue Schubkurve des Antriebssystems zu kennen und zu modellieren, um einen stabilen manuellen Flug ohne GPS zu ermöglichen.
Individuelle Lösung
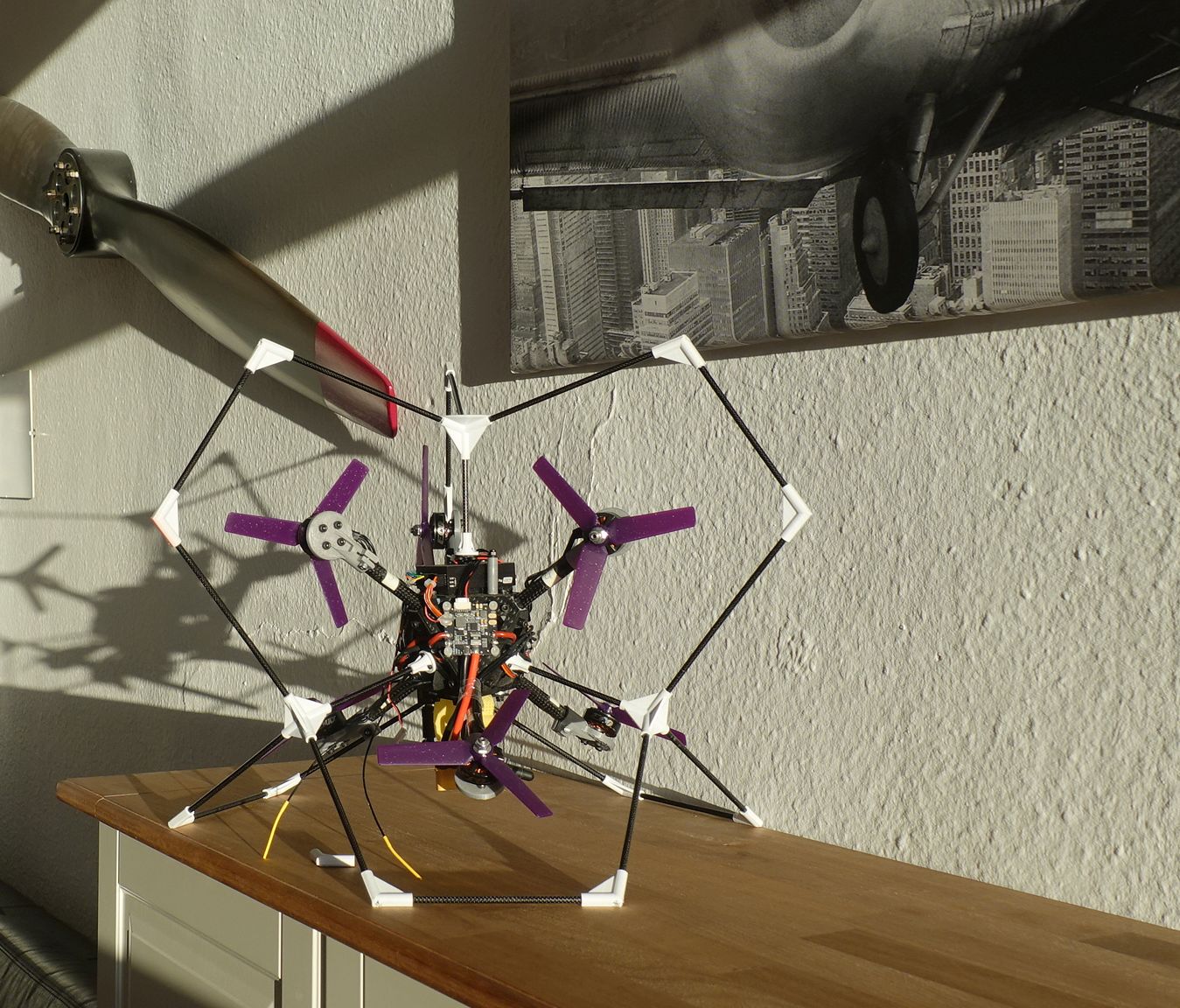
Mit Hilfe von 3D-Druck und gefrästen Bauteilen aus kohlefaserverstärktem Kunststoff (CFK) wurde ein flugfähiger Prototyp gebaut. Die Software wurde schrittweise angepasst, bis ein vollständiger 6DOF-Flug erreicht wurde.
Kunde
Terrence Howard, Tangential Flight Corporation, USA
Jahr
2021
Projektdauer
5 Monate
- Entwicklung eines Steuerungskonzepts für eine Drohne mit 6 Freiheitsgraden
- Vermessung eines Rotorsystems zur Systemidentifikation der Antriebseinheiten
- Fertigung eines flugfähigen Prototyps
- Flugerprobung zur Demonstration des Potenzials der Erfindung

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
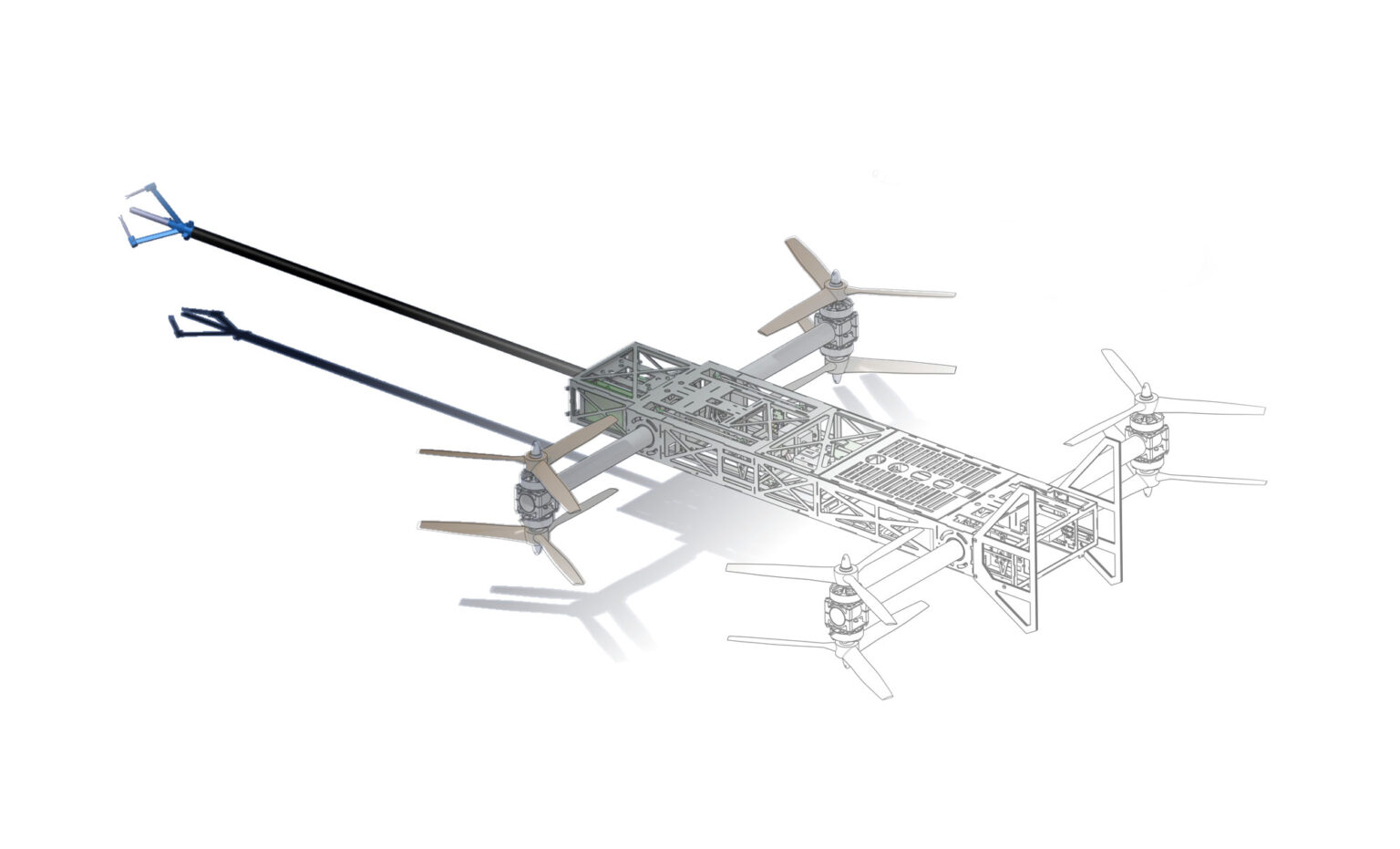
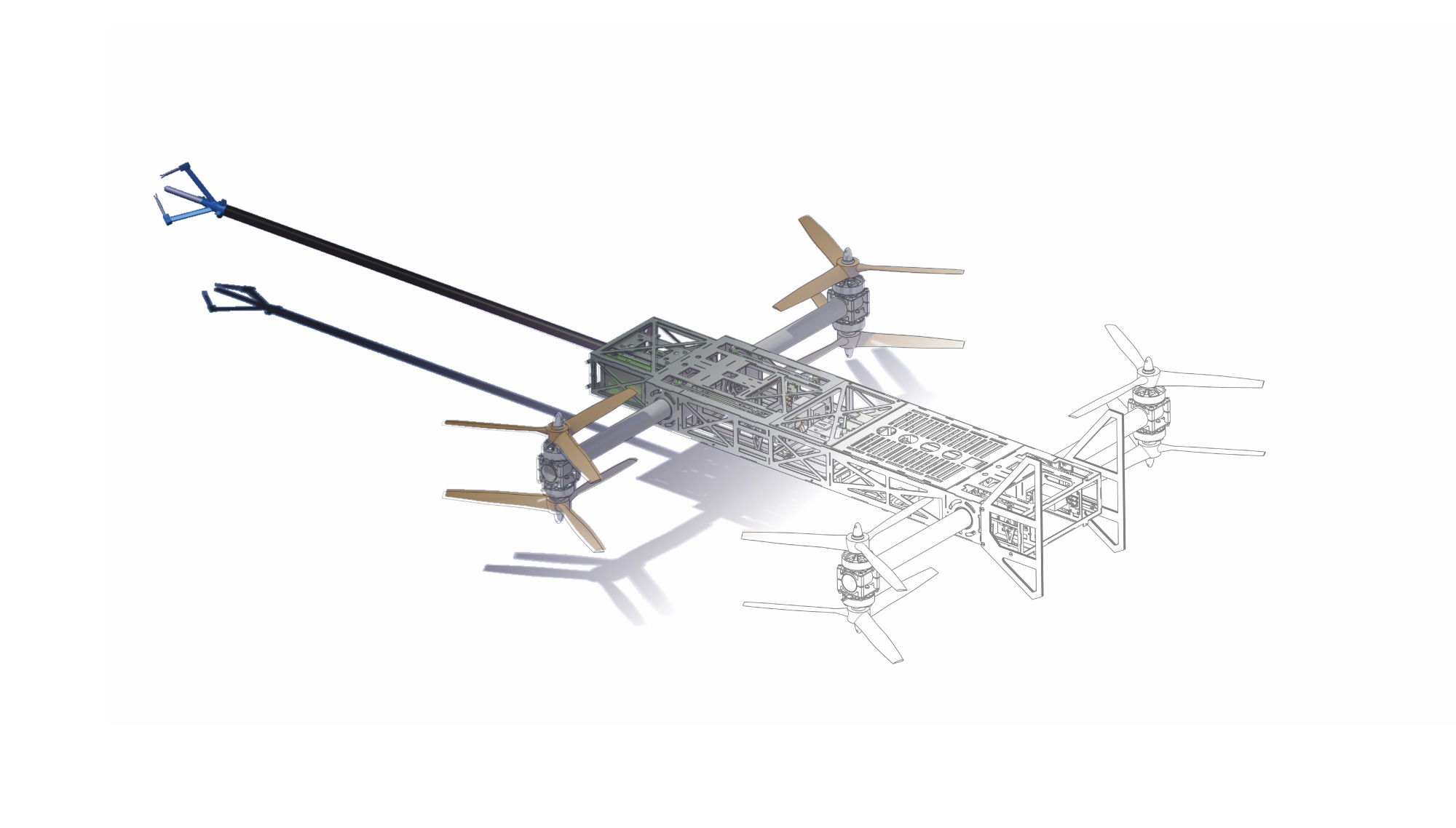
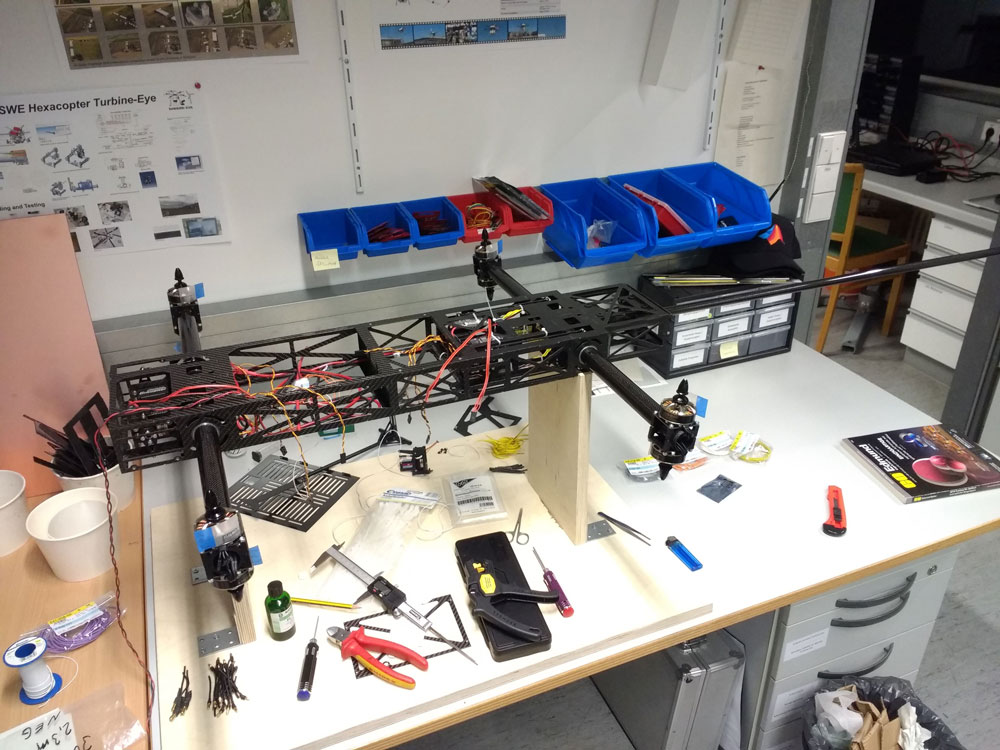
ANDroMeDA – ANWIND Drone for Measurement and Data Acquisition
Vier ANDroMeDA-Drohnen wurden bis 2020 im Rahmen des Promotionsprojekts von Dr. Christian Molter am Lehrstuhl für Windenergie der Universität Stuttgart entwickelt, als Teil des vom Bundesministerium für Wirtschaft und Energie geförderten Projekts ANWIND.
Ausgangssituation
Eine Drohne musste für Windmessungen zu Forschungszwecken entwickelt werden. Mehrere dieser Drohnen sollten gleichzeitig eingesetzt werden, um ein dreidimensionales Bild des Windfeldes zu erhalten – beispielsweise in komplexem Gelände.
Besondere Herausforderungen
Das Fluggerät musste in der Lage sein, plötzliche Windrichtungswechsel und Windböen zu kompensieren. Da die Rotoren des Fluggeräts starke Nachläufe erzeugen, durfte die Messtechnik nicht in der Nähe der Rotoren platziert werden.
Individuelle Lösung
Schwenkbare Propeller wurden in das Design integriert, sodass die Flugsteuerung über die Verstellung der Propeller erfolgt, anstatt durch Bewegungen des gesamten Flugkörpers. Dadurch beeinflussen Flugmanöver zur Kompensation von Windböen nicht die Messergebnisse. Zusätzlich wurde der Messausleger frequenzoptimiert und ein Kerbfilter wurde in den Flugregler integriert, um Schwingungen des Auslegers zu vermeiden und die Signalqualität weiter zu verbessern.
Ein Vergleich zwischen konventionellen Messdaten eines Ultraschall-Anemometers an einem meteorologischen Messmast und den durch die Drohne erfassten Daten zeigte eine hervorragende Übereinstimmung. Für das neuartige Design wurde erfolgreich ein Patent angemeldet.
Kunde
Dissertation
Jahr
2018-2020
Projektdauer
2 Jahre
- Vollständig integriertes Messsystem mit Live-Vorschau am Boden
- Speziell entwickeltes Fluggerät für Windmessungen
- Hochgradig individualisierter Ansatz mit schwenkbaren Propellern
- Start und Landung mit nach oben gekipptem Rumpf
Weiterführende Links
https://elib.uni-stuttgart.de/items/e7e1b7e2-4d89-49aa-9d52-d068c71e9953
Messtechnik
Die Messtechnik mit drei Hitzdrähten wurde zusammen mit der SVMtec GmbH entwickelt:
{kind=link}
{kind=link}
{kind=link}
{kind=link}